Environment Setup
-
Install necessary components with apt:
sudo apt install dialog python3-dev make git bc gcc flex bison ninja-build libssl-dev rsync pkg-config device-tree-compiler squashfs-tools parted dosfstools -
Download a higher version of CMake:
-
Fetch repo:
- Note that you must add your public key to GitHub. If it’s a new Ubuntu system, you need to generate a public key with the
ssh-keygencommand and add it to your GitHub account, or you will encounter permission issues later. - Create a directory to store repo, and fetch repo from Tsinghua source:
mkdir <path_to_repo>/duo-manifest curl https://mirrors.tuna.tsinghua.edu.cn/git/git-repo -o repo- Grant permissions:
chmod a+rx repo - Note that you must add your public key to GitHub. If it’s a new Ubuntu system, you need to generate a public key with the
-
Fetch the SDK:
- Create and navigate to a new directory.
- Export the repo path above (as a good practice, avoid cluttering your
bashrcandPATH).
export PATH="<path_to_repo>/duo-manifest:${PATH}"- Point to Tsinghua source:
export REPO_URL='https://mirrors.tuna.tsinghua.edu.cn/git/git-repo/'- Fetch the SDK:
repo init -u git@github.com:milk-v/duo-manifest.git -b main -m milk-v_duo_cv180xb_sdk.xml repo sync -
Compilation:
- Specify the CMake path:
export PATH="<path_to_cmake>/cmake-3.19.3-Linux-x86_64/bin:${PATH}"- Compile:
source build/cvisetup.sh defconfig cv1800b_sophpi_duo_sd build_all pack_sd_image -
Burning
sudo dd if=./install/soc_cv1800b_sophpi_duo_sd/sophpi-duo-<**>.img of=/dev/sda bs=32M status=progress oflag=direct -
Connect via UART interface
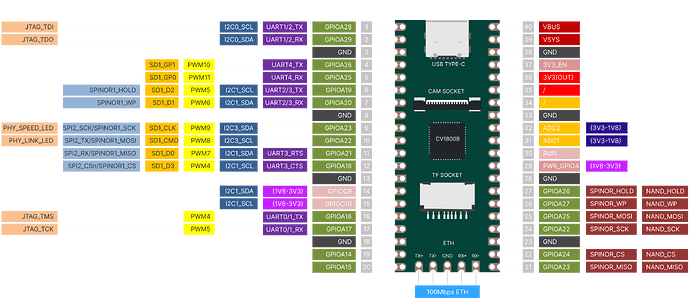
- Start from the fourth pin from the bottom left corner, with a baud rate of 115200.
- If you encounter gibberish, using 120000 might display bootloader output, typically indicating a failed boot.

Exploration
-
To use GADGET, the configuration was modified before compilation:
CONFIG_USB_OSDRV_CVITEK_GADGET=yHowever, it seems that it did not take effect.
[root@cvitek]~# ifconfig -a eth0 Link encap:Ethernet HWaddr 0E:43:45:E2:0F:6E UP BROADCAST MULTICAST MTU:1500 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B) Interrupt:19 lo Link encap:Local Loopback inet addr:127.0.0.1 Mask:255.0.0.0 UP LOOPBACK RUNNING MTU:65536 Metric:1 RX packets:0 errors:0 dropped:0 overruns:0 frame:0 TX packets:0 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)The firmware version from May 2023 already supports RADIS. It’s uncertain whether the code configuration for the latest version has been submitted to the repository.
usb0 Link encap:Ethernet HWaddr 62:56:94:45:C3:29 inet addr:192.168.42.1 Bcast:192.168.42.255 Mask:255.255.255.0 UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1 RX packets:35 errors:0 dropped:16 overruns:0 frame:0 TX packets:8 errors:0 dropped:0 overruns:0 carrier:0 collisions:0 txqueuelen:1000 RX bytes:6450 (6.2 KiB) TX bytes:1608 (1.5 KiB) -
The SPI device is not mounted.
[root@cvitek]~# ls /dev/ bus cvi_vc_dec4 full null console cvi_vc_dec5 gpiochip0 ptmx cvi-base cvi_vc_dec6 gpiochip1 pts cvi-dwa cvi_vc_dec7 gpiochip2 random cvi-fast-image cvi_vc_dec8 gpiochip3 rfkill cvi-mipi-rx cvi_vc_enc0 gpiochip4 root cvi-rgn cvi_vc_enc1 hwrng shm cvi-rtos-cmdqu cvi_vc_enc2 i2c-0 snd cvi-sys cvi_vc_enc3 i2c-1 tty cvi-tpu0 cvi_vc_enc4 i2c-2 ttyS0 cvi-vi cvi_vc_enc5 ion ttyS1 cvi-vpss cvi_vc_enc6 kmsg ttyS2 cvi_vc_dec0 cvi_vc_enc7 mem ttyS3 cvi_vc_dec1 cvi_vc_enc8 mmcblk0 ttyS4 cvi_vc_dec2 cvitekaadc mmcblk0p1 urandom cvi_vc_dec3 cvitekadac mmcblk0p2 zero -
It appears that there is an enabled SPI device in the device tree.
&spi3 { status = "okay"; num-cs = <1>; spidev@0 { compatible = "rohm,dh2228fv"; spi-max-frequency = <1000000>; reg = <0>; }; };
Program
-
Given that the self-compiled system does not have RADIS, the official release image was used. In an Ubuntu 20 system, it automatically creates a virtual network card without drivers, and the PC can see it on the 192.168.42.x subnet. As mentioned earlier, the development board’s IP address is 192.168.42.1.
-
SSH Connection
-
GDBserver
- Locate the
gdbserverin the SDK:
find -name gdbserver- Download it using SCP:
scp ./ramdisk/rootfs/public/gdbserver/riscv_musl/usr/bin/gdbserver root@192.168.42.1:~/ - Locate the
-
Compilation
- There are three different toolchains:
riscv64-elf,riscv64-linux-x86_64, andriscv64-linux-musl-x86_64. The programs compiled with theriscv64-elftoolchain can run directly, and system libraries are likely compiled with this toolchain. However, during debugging, the program cannot continue after hitting a breakpoint.
<path_to_sdk>/duo-src/host-tools/gcc/riscv64-elf-x86_64/bin/riscv64-unknown-elf-gcc -o main main.c -g- There are two other toolchains,
riscv64-linux-x86_64andriscv64-linux-musl-x86_64. However, programs compiled with dynamic linking cannot run directly, so static compilation is preferred, but debugging can proceed normally.
<path_to_sdk>/duo-src/host-tools/gcc/riscv64-elf-x86_64/bin/riscv64-unknown-elf-gcc -o main main.c -g -static- Download the program:
scp main root@192.168.42.1:~/ - There are three different toolchains:
-
Run the program:
- ./main -
Debug the program:
- ./gdbserver :1234 main -
Integrate it into VSCode:
{
"name": "(gdb) Start",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceRoot}/main",
"args": [],
"stopAtEntry": false,
"miDebuggerServerAddress": "192.168.42.1:1234", // Target board's IP address and port
"cwd": "${workspaceRoot}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
// "miDebuggerPath": "<path_to_sdk>/duo-src/host-tools/gcc/riscv64-elf-x86_64/bin/riscv64-unknown-elf-gdb",
"miDebuggerPath": "<path_to_sdk>/duo-src/host-tools/gcc/riscv64-linux-x86_64/bin/riscv64-unknown-linux-gnu-gdb",
"setupCommands": [
{
"description": "Enable pretty printing for GDB",
"text": "-enable-pretty-printing",
"ignoreFailures": true
},
{
"description": "Set disassembly flavor to Intel",
"text": "-gdb-set disassembly-flavor intel",
"ignoreFailures": true
}
]
}
- Click F5 to start debugging.
- Result:
