Pinpong
Follow the guide to install pinpong.zip (my mirror), only for V1.0.4 system image, and then:
blink2.py
import time
from pinpong.board import Board,Pin
Board("MILKV-DUO").begin()
led = Pin(Pin.D0, Pin.OUT)
while True:
led.value(1)
time.sleep(1)
led.value(0)
time.sleep(1)
The pinpong library covers quite a lot of functionality, and useful examples:
root@milkv-duo2]~# ls /usr/lib/python3.9/site-packages/pinpong/examples/milkv-Duo/
__init__.py gravityPM2.5.py oled2864.pyc
__init__.pyc i2c.py ozone.py
adc.py i2c.pyc ozone.pyc
adc.pyc i2c_scan.py paj7620.py
as7341.py i2c_scan.pyc paj7620.pyc
as7341.pyc iic_to_serial.py ph1.py
blink.py iic_to_serial.pyc ph1.pyc
blink.pyc ir_recv.py ph2.py
bme280.py ir_recv.pyc ph2.pyc
bme280.pyc ir_send.py pwm.py
bme680.py ir_send.pyc pwm.pyc
bme680.pyc irq.py rgb_panel.py
bmi160_acc.py irq.pyc rgb_panel.pyc
bmi160_acc.pyc lcd1602.py sen0483.py
bmi160_step.py lcd1602.pyc sen0483.pyc
bmi160_step.pyc lis2dh.py servo.py
bmp280.py lis2dh.pyc servo.pyc
bmp280.pyc max30103.py sht31.py
bmp388.py max30103.pyc sht31.pyc
bmp388.pyc mics_enable_power.py speech_synthesis.py
button.py mics_enable_power.pyc speech_synthesis.pyc
button.pyc mics_get_adc_data.py spi.py
buzzer.py mics_get_adc_data.pyc spi.pyc
buzzer.pyc mics_get_gas_exist.py sr04_urm10.py
ccs811_read_baseline.py mics_get_gas_exist.pyc sr04_urm10.pyc
ccs811_read_baseline.pyc mics_get_gas_ppm.py st7789-as7341.py
ccs811_read_data.py mics_get_gas_ppm.pyc st7789.py
ccs811_read_data.pyc mlx90614.py st7789.pyc
dht.py mlx90614.pyc tcs34725.py
dht.pyc mp3.py tcs34725.pyc
dht20.py mp3.pyc tds.py
dht20.pyc neopixel.py tds.pyc
ds0469.py neopixel.pyc tone.py
ds0469.pyc nfc.py tone.pyc
ds1307.py nfc.pyc uart.py
ds1307.pyc nfc_card_info.py uart.pyc
ds18b20.py nfc_card_info.pyc urm09.py
ds18b20.pyc nfc_uart.py urm09.pyc
ens160.py nfc_uart.pyc vl53l0.py
ens160.pyc nfc_uart_card.py vl53l0.pyc
gp2y1010au0f.py nfc_uart_card.pyc
gp2y1010au0f.pyc oled2864.py
I will explore those examples.
Start Script at Boot
As of V1.0.4 system image, the /etc/init.d/S99user executes /mnt/data/auto.sh if it exists:
% mkdir /mnt/data
% vi /mnt/data/auto.sh
and list each of the processes:
/path/to/my/script.sh &
python /path/to/another/script.py &
TinyCC
According this post, tinycc has been ported as well – C compiler and C interpreter in one – download the .zip (my mirror) and run its install.sh, and then fix missing executable bit:
% chmod +x /usr/local/bin/tcc
and start playing with test.c:
#!/usr/local/bin/tcc -run
#include <stdio.h>
int main(int argc, char **argv) {
printf("%s---\n", "hello milk-v!");
return 0;
}
% tcc -o test test.c
% ./test
hello milk-v!---
% chmod +x test.c
% ./test.c
hello milk-v!---
Thanks to Yang who ported and provided the download.
I2C: SSD1306 OLED
I followed the example, and compiled the sources on the board itself with tcc:
tcc -r ssd1306.c -I .
tcc -r linux_i2c.c -I .
tcc -o ssd1306 main.c linux_i2c.o ssd1306.o -I .
./ssd1306 -I 128x64
./ssd1306 -c
./ssd1306 -m "Hello world!\nMilk-V Duo"

OLED SSD1306 connected to Milk-V Duo via I2C, controlled via RISC-V binary ssd1306 from ssd1306_linux
Software State
| ON-BOARD | BUILDROOT V1.0.4-2023-0908 | BUILDROOT V1.0.4-2023-1017-SPIRITDUDE | ARCHLINUX 2023-10-09 V0.0.1 SPIRITDUDE |
|---|---|---|---|
| available memory (RAM) | 48MB | 55MB | 55MB |
| ssh server | ok (dropbear v2020.81) | ok (dropbear v2020.81) | ok (dropbear v2022.83) |
| ssh client | ok (dropbear v2020.81) | ok (dropbear v2020.81) | ok (dropbear v2022.83) |
| python | ok (python 3.9.5) | ok (python 3.9.5) | ok (python 3.11) |
py web-server (with socket) |
ok | ok | ok |
py gpio (with pinpong or gpio) |
ok | ok | |
py spi (with built-in spidev) |
available, not yet tested | available, not yet tested | |
py i2c (with pinpong ) |
available, not yet tested with pinpong |
||
| ok with .c (see above section) | available, not yet tested with pinpong |
||
| ok with .c (see above section) | |||
py pwm (with pinpong) |
not found, /sys/class/pwm/* is empty |
not found, /sys/class/pwm/* is empty |
|
| pip | failed (hangs), enable swap space to use it | barely works, enable swap space | works (swap space enabled) |
| cc/gcc/clang | not found | not included | not included |
| tinycc/tcc | ok, see this post how to install | ok, see this post how to install | ok |
| rsync | not found | included | included |
| wget | ok, but no https (only http, ftp) | ok, but no https (only http, ftp) | not included, installable |
| lua/luac | lua (5.4.6): segmentation fault, luac (5.4.6): seems to work (both compiled with tinycc) | lua & luac (5.3.6) works | lua & luac (5.4.6) works |
| extras | quickjs/qjs, micropython, nano, screen, git, make (no gcc/cc, use tinycc), thttpd, nginx, lighttpd, php-cgi, file, which, sudo | pacman (package mgr), lighttpd, file, which, sudo, make |
Internet Access for Milk-V Duo
RNDIS (Virtual Ethernet over USB)
The host has to run Ethernet over USB and also operate as transparent router and let the connected board(s) reach the internet, see this guide (use google translate to english), here the brief description:
On The Host
The outgoing_if is the outgoing interface, either eth0 or wpl0s0 or something, check with ifconfig of the proper name, and then as root perform:
% sysctl net.ipv4.ip_forward=1
% iptables -P FORWARD ACCEPT
% iptables -t nat -A POSTROUTING -o outgoing_if -j MASQUERADE
Also, find out which IP your host got (ip_of_host) from the connected board, e.g. 192.168.42.120, also check with ifconfig.
On The Board
% ip r add default via ip_of_host
% echo "nameserver 8.8.8.8" >> /etc/resolv.conf
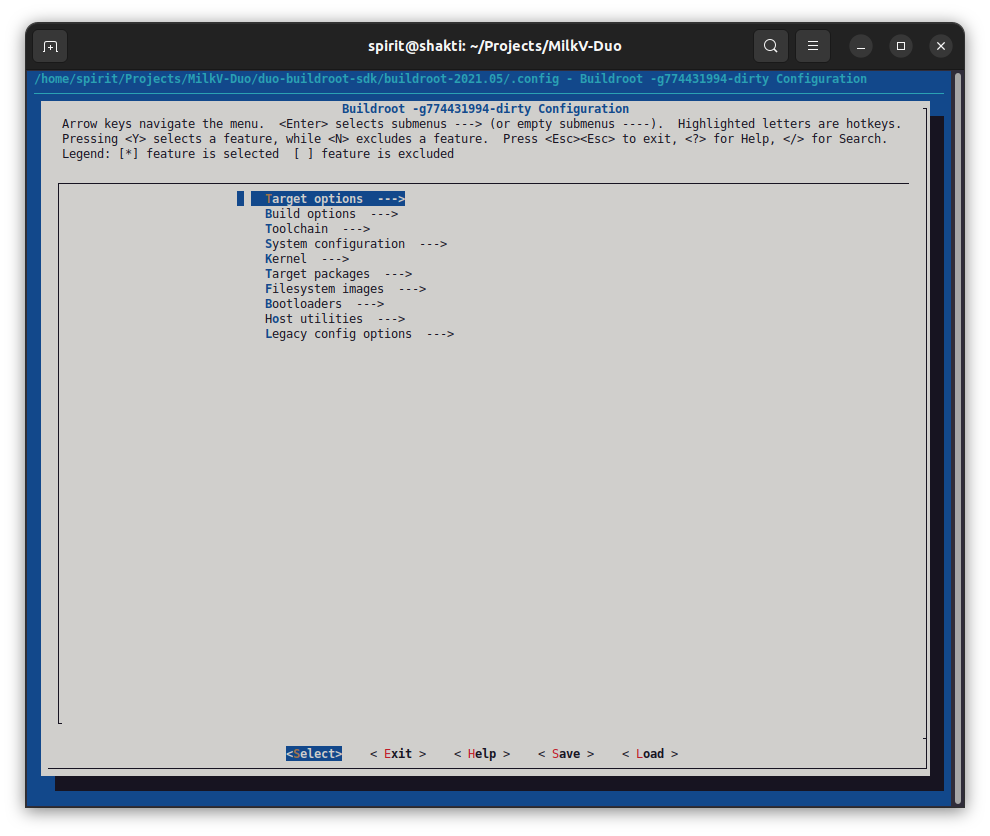
Custom BuildRoot Milk-V Duo Disk Image
Here my brief guide – see also this guide (use google translate) – how to customize packages included in the base distribution of the image for the SD card:
% cd duo-buildroot-sdk/buildroot-2021.05
% make menuconfig
then go into the “Target packages”, and then walk through:
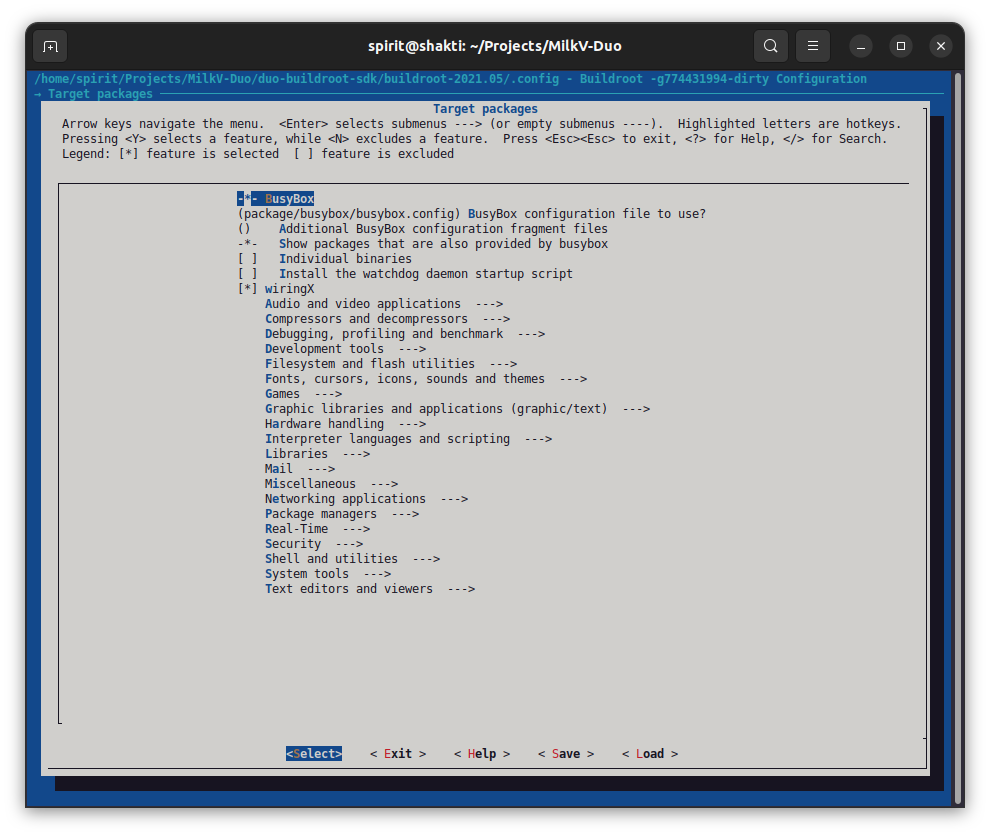
- Audio and video applications
- Compressors and decompressors
- Debugging, profiling and benchmark
- Development tools
- Filesystem and flash utilities
- Fonts, cursors, icons, sounds and themes
- Games
- Graphic libraries and applications (graphic/text)
- Hardware handling
- Interpreter languages and scripting
- Libraries
- Miscellaneous
- Networking applications
- Package managers
- Real-Time
- Security
- Shell and utilities
- System tools
- Text editors and viewers
once you selected the packages you like to have included, choose “Save” and confirm as ‘.config’ and then “Exit”.
% cp .config configs/milkv_duo_musl_riscv64_defconfig
% cd ..
% ./build_milkv.sh
and after while, depending on how many packages you selected, you find in out/ folder your new disk image you can copy on the SD card.
Note: buildroot is quite a quirky package, e.g. when you select a package and make a build, later deselect a package, it will still be included – worse, if you commit a clean slate in output/, some packages might not fully build anymore – you have to go back to an earlier state of fewer packages, remake the build, and restart re-selecting new packages.
Postfixing missing .so file
As of 2023/10 v1.0.4 buildroot-2021.05 environment, there seems a problem regarding a missing shared library for some of the compiled apps (like qjs), you can fix this:
% cd /lib
% ln -s ld-musl-riscv64v0p7_xthead.so.1 ld-musl-riscv64.so.1
My BuildRoot Custom Disk Images
| DISK IMAGE | NOTES |
|---|---|
| milkv-duo-v1.0.4-20231017-spiritdude-64mb_ram-nocam.img | lua, quickjs/qjs, micropython, nano, screen, git, make (no gcc/cc, use tinycc), thttpd), nginx, lighttpd, php-cgi, 55MB RAM available, “fixed” image has .so lib-fix included |
| milkv-duo-v1.0.4-20231017-spiritdude-64mb_ram-nocam-fixed.img | lua, quickjs/qjs, micropython, nano, screen, git, make (no gcc/cc, use tinycc), thttpd), nginx, lighttpd, php-cgi, 55MB RAM available, “fixed” image has .so lib-fix included |
| milkv-duo-v1.0.4-20231016-spiritdude-64mb_ram-nocam.img | lua, quickjs/qjs, micropython, nano, screen, git, make (no gcc/cc, use tinycc), lighttpd (doesn’t work yet out of the box),55MB RAM available |
- apprx. 55MB actual available RAM, no camera support, INO_SIZE=0
- thttpd, nginx and lighttpd are all http-server, only use one, see
/etc/init.d/where those are started.
Ethernet Add-On
The easier way is to get proper networking is to add a real ethernet port and properly wire it to the ethernet router. There are several options & sources (2023/09):
- SpotPear: RJ45 for MilkV-Duo (EUR 2.50/pc)
- Installation Guide: insert the RJ45 board from underneath (very tight fit) and push up, solder, and then cut the pins so you can insert SD card again
- SpotPear: IO Expansion for MilkV-Duo 4x USB 1x Ethernet
- Aliexpress: SpotPear (USD 9.50/pc)
- Arace: USB & Ethernet Board (USD 5.00/pc – discounted)

RJ45 Add-on (EUR 2.50)
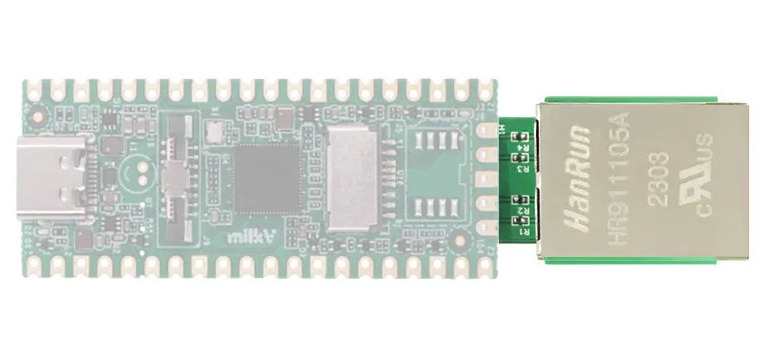
RJ45 Add-on (EUR 2.50)

IO Expansion: 4x USB 1x Ethernet (USD 5.00 – 9.50)
Printable Case
I did a small case for the bare board without Ethernet or Extension board to be 3D printed:
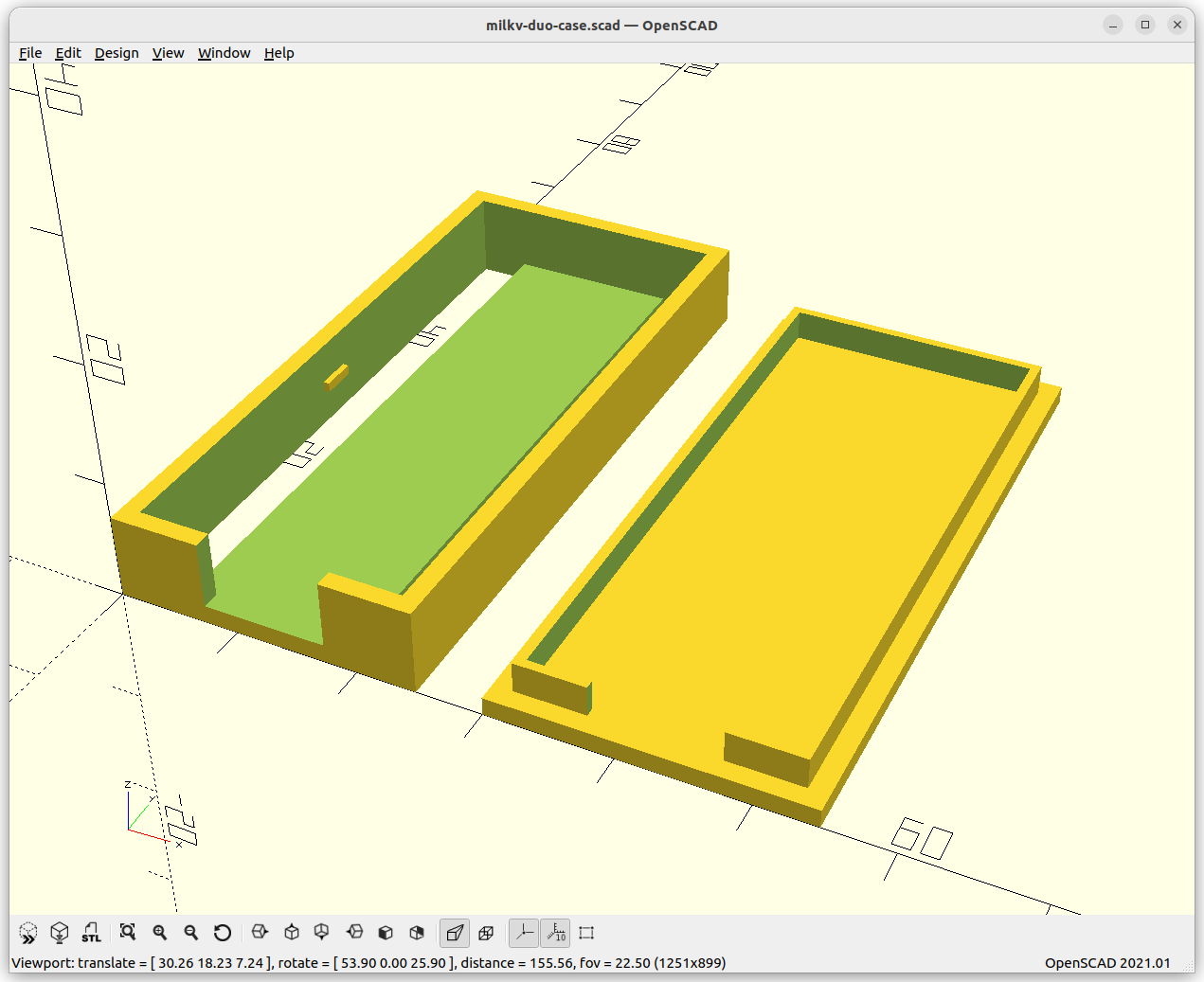
Milk-V Duo (bare):
bottom case & lid

Milk-V Duo (bare): bottom case

Milk-V Duo case closed

Printed in white & black PLA

white vs black case blue & red LEDs see-through

white PLA cases allow LEDs see through

white PLA (FFF/FDM), white & clear resin (MSLA)

Download
- Printables: Milk-V Duo Simple Case (STL, SCAD): very basic case
As the Milk-V Duo has the same width and depth (X/Y) as the Raspberry Pico but it’s a bit thicker so the some of the existing cases work only partially:
- Raspberry Pi Pico Case by Botvinnik
works perfectly, recommended, bottom/lid with 2 options: closed or with holes - Raspberry Pi Pico Case w Slider 3D Print Model by AndysTechGarage
bottom part works, but lid doesn’t fit due the camera connector; you need to disconnect board from power in order to put in or out from the case Raspberry Pi Pico Case by Kuma0055: has pins for holes which Milk-V Duo PCB doesn’t have, not recommended
As soon my Ethernet connectors and Extension boards arrived I will provide case variants (2023/10/05).
References
- Milkv.io: Milk-V Duo , original web-site
- Milk-V User Forum with Duo related posts, highly recommended
- Github: Milk-V Duo Buildroot , build your own Linux image
- Github: Milk-V Duo Experiments
- Sophgo: CV1800B (Duo English Forum) , another forum
- YouTube: Platima Tinkers: Testing out the Milk-V Duo – The new $9 RISC-V eSBC that runs Linux! (2023/09)